销售热线:185 7555 2252
销售热线:185 7555 2252
五轴数控机床万能主轴头空间误差建模研究
随着自由曲面的大量应用,现代制造业对五轴机床的需求越来越大。五轴机床按照结构的不同可分为双转台式、转台加摆轴式、万能主轴头式等几种形式。万能主轴头型数控机床的两个回转轴都位于主轴上,由于万能主轴头相对于其他类型的主轴增加了两个旋转轴,使其运动误差大大增加,误差来源量之间的关系也变得更加复杂。
近年来,对各种类型的五轴机床进行误差建模成为研究的热点。比如,上海交通大学的张宏韬对双转台型五轴机床进行了误差建模研究,天津大学的商鹏对摆头加转台型的五轴机床进行了误差建模研究。对于万能主轴头型数控机床,国际标准ISO 10791-6提出了其运动精度的球面运动检测方案。K.M.MudithADassanayake在此方案的基础上提出了通过观测方程识别其十项静态误差的方法。
上述研究中都是使用齐次变换矩阵(HTM)对五轴机床进行误差建模,它依赖于大量的矩阵乘法运算,运算量大,其误差模型的物理意义很难理解。本文针对万能主轴头型五轴机床进行建模研究,通过优化坐标系设置,提出一种简化建模方法,其数学表达式简单,物理意义明确。
1 主轴头运动坐标系的建立
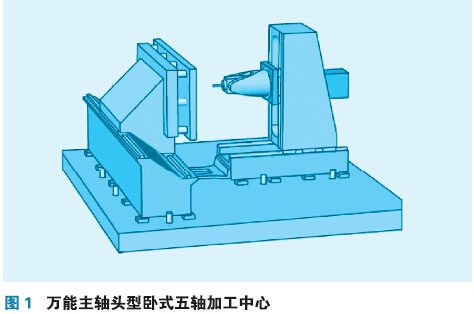
万能主轴头型卧式机床的结构如图1所示。
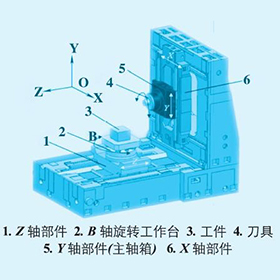
由于本文只研究万能主轴头的误差建模问题,为防止引入其他误差,测量时,保持X、Y和Z轴不动,只有主轴头的A轴和C轴做旋转运动。根据机床结构,建立机床各部分组件的坐标系,如图2所示。
首先建立机床参考坐标系F(OF-XFYFZF)。因为只有主轴头的A轴和C轴运动,X、Y、Z轴没有运动,所以我们可以把X、Y、Z轴看作和机床床身是一体的。为简化坐标变换,我们以静止时的C轴中心线和A轴中心线的交点O(即初始状态下名义C轴和名义A轴的交点)上建立参考坐标系F(OF-XFYFZF)。很显然,我们可以在OF上同时建立C轴名义坐标系C(Oc-XcYcZc)。这样,C坐标系对F坐标系就只有旋转变换,而没有位移变换,误差变换方程相对简单。但是,我们却不能在OF上同时建立A轴坐标系。因为A轴在运动链上是C轴的下一环,C轴的运动会影响名义A轴的位置。如图2所示,A轴名义中心线和C轴中心线的交点变动到了Oc''的位置。我们只能在这个变动后的交点上建立A轴名义坐标系(OA-XAYAZA),这样,A坐标系对C''坐标系也只有旋转变换,而没有位移变换。图2中,A轴和C轴的名义坐标系用虚线表示,实际坐标系用实线表示。
由以上过程可知,所有的5 个坐标系都是建立在C轴中心线和A轴中心线的交点上,只不过这个交点因为C轴和A轴的不同运动状态而产生了3个不同的位置。因此,运动链刀具环坐标系建立的过程可用“一个交点、3种状态、5个坐标系”来概括。一个交点,即两个旋转轴中心线的交点O。3种状态分别指两个轴都静止、C轴运动而A轴静止、两个轴都运动。交点O 在这3 种状态下的位置是不同的,在这3个不同的位置处建立5个运动坐标系。
2 主轴头空间误差建模
机床运动链由刀具环和工件环组成,万能主轴头型机床的运动误差主要在刀尖点环,详细分析如下。
2.1 刀具环误差分析
从刀具环运动传递的顺序来看,各坐标系的运动传递关系是:
按照刀具环运动传递的顺序,误差建模包括位置描述、坐标映射、旋转变换和微分变换等过程,具体如下:
1)位置描述
刀尖点的位置在刀具环末端坐标系A''中被描述。刀尖点在A''中的名义位置是A''TN,受热误差影响,误差矢量表示为A''δT,N(t)。由此,我们就可以得到刀尖点的实际位置在末端坐标系A''中的描述,即
设刀尖点到参考点的距离为L。则
在高速旋转时,刀具热误差对空间误差作用显著,不可忽略。表示为
2)运动变换
因为所建立的5个坐标系全部都在不同状态下C轴中心线和A轴中心线的交点上,所以,所有的运动变换可由微分变换和旋转变换来完成。
首先考虑刀尖点位置从运动链末端坐标系A''向A坐标系的变换。这是一个微分变换,由微分移动变换和微分转动变换组成,可表示为
其中,Aδ(α)为摆头A绕X轴转过α角时产生的误差矢量,是A'' 坐标系的对A坐标系的微分移动矢量,可表示为
而AA''R表示A轴实际坐标系相对于自身名义坐标系的微分转动变换,基于小角度假设,AA''R可表示为
同理,刀尖点位置从C''坐标系到C坐标系的变换可表示为
式中:Cδ(γ)为转台C绕Z 轴转过α角时产生的误差矢量。
CC''R是C轴实际坐标系相对于自身名义坐标系的微分转动变换,可表示为
最后,考虑两坐标系之间只有旋转变换而没有平移变换的情况。根据本文第二节中的分析可知,我们在OF上建立C轴名义坐标系(OC-XCYCZC),在OC''上建立A轴名义坐标系(OA-XAYAZA),所以在坐标变换中我们有两个 旋转算子C''AR和FCR。
C''AR为A绕X 轴转过α角时的旋转算子,可表示为
同理,CFR为绕C轴转过γ角时的旋转算子,可表示为
由以上分析,可得刀尖点在参考坐标系的位置矢量为
2.2 工件环误差分析
虽然确定了参考坐标系,但工件的位置常用工作台上的坐标系表示。在工作台中心位置设立X坐标系。X坐标系和F坐标系之间无相对运动,只有位置关系。工件的安装误差可通过对刀等方式消除,忽略不计。
根据平移变换原理,有
式中:FPOX是指X坐标系原点在F坐标系中的位置矢量。随着数控机床误差测量和补偿技术的进步,直线运动轴的误差越来越容易辨识和消除,而且相比之下,旋转轴误差要比直线轴误差显著得多。所以,工件环中的误差可予以忽略。
2.3 主轴头空间误差计算
由万能主轴头引起的空间误差可用刀尖点位置矢量和工件位置矢量的差值表示为
至此,我们完成了对五轴机床万能主轴头的误差建模。
3 实例研究
针对图2所示的万能主轴头型五轴机床,推导出刀具的位置误差和方向误差的公式为
4 结束语
针对五轴数控机床的万能主轴头进行了空间误差建模研究,考虑了主轴头两个旋转轴的运动误差和主轴热误差对机床空间精度造成的影响。根据万能主轴头结构特点,提出了“一个交点、3种状态、5个坐标系”的坐标系设置方法,降低了误差模型的复杂性。通过坐标系的微分变换和旋转变换,建立了万能主轴头的空间误差模型,并结合实例,推导出了刀具的位置误差和方向误差的公式,为进一步进行万能主轴头误差辨识和误差补偿奠定了理论基础。