销售热线:188 2384 2885
销售热线:188 2384 2885
数控机床分布式监控系统通信接口设计
随着计算机、通信和网络技术的发展,数控系统正向智能化、网络化方向发展,数控机床作为制造系统的核心装备,其复杂程度及智能化进程也不断提高,而数控机床的加工精度、机床运行是否正常等都需要一个监控系统来反映,监控系统在一定程度上保证了机床安全可靠地运行,尤其是当前数控机床高速、高精度、智能化的要求,数控机床监控系统也要不断发展以满足数控机床的需求.对于数控机床监控系统的研究虽然已有一些成果,如第一代监测与诊断系统,以及后来的基于INteRNet的网络化远程监测及故障诊断系统。然而随着数控机床要求的提升,也要求监控系统性能做出相应的提升,如可扩展性、实时性、对机床的加工精度的在线测试、运行状态的在线监测等,监控系统也显得越来越重要.本研究针对数控机床,在一种分布式监控系统的基础上,设计了分布式监控系统的通信接口,并通过监控系统具体应用于数控机床中,验证了这种通信接口的可行性。
1 监控系统总体结构
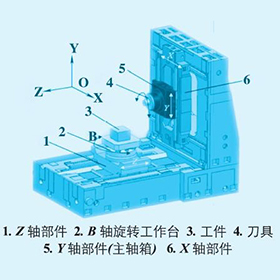
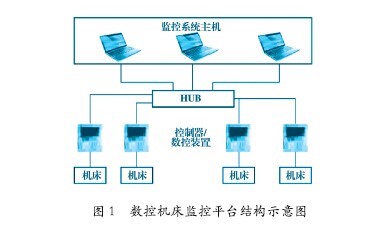
为适应数控机床监控系统的分布式结构,本文中的数控机床监控系统由多台PC组成,各个PC可以独立分布于不同位置,也可以独立地监控相同或不同的数控机床.各个独立的主机通过HUB与多台数控机床中数控系统相连,组成一个星形网络拓扑结构,形成了分布式监控系统,监控系统通过数控系统获取机床各个轴运动位置、反馈、状态等数据;同时,监控系统也可以向数控系统发送指令,控制机床的运动等。
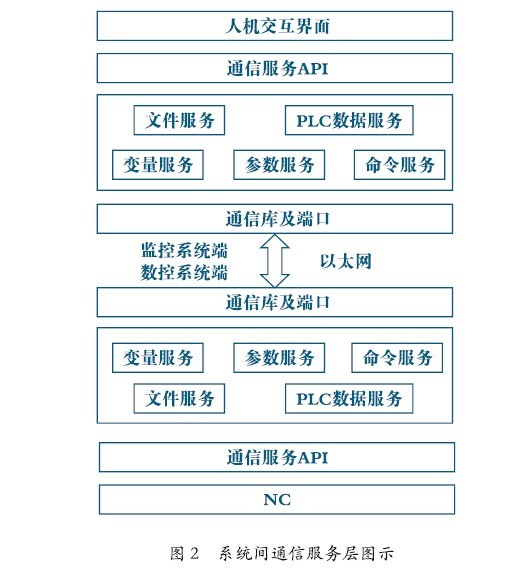
变量服务为上层应用周期性地提供数控机床的状态数据,例如机床指令坐标位置、实际坐标位置、进给速度、主轴速度等,变量服务在设定的采样周期内完成一次所有在线数控机床的数据采集,该服务为实时监测数控机床的运行状态提供了基础,参数服务为上层应用软件非周期性地读取DNC的参数数据,修改DNC的参数数据,命令服务为上层应用软件提供远程控制的服务。文件服务为上层应用软件提供加工程序的传输、选择等服务。PLC数据服务提供PLC数据的扫描上传及诊断等服务.数据通信服务为数控机床监控平台提供了数据交互的基础,是实现数控机床监控平台的基础功能。为了使通信服务独立性好,为上层应用软件提供透明的服务,设计了一系列的通信API接口,为上层应用软件提供API接口包,将数据通信服务平台和上层应用软件剥离,使通信服务模块化、规范化、标准化,便于程序的移植.对于上层应用软件,通信服务的具体实现是透明的,应用软件的开发人员无须关注底层通信服务的实现细节,只调用相关的API接口即可。
2 监控系统数据通信接口设计
在数控机床接入监控系统后,数控系统向监控系统发送确认信息,信息内容包含接入设备名称、生产厂商等基本信息;监控系统在接收信息确认后,在监控系统内部对该数控机床建立基本信息库,对其进行IP等基本配置,配置完成后,数控系统进入等待命令状态中,在接收到监控系统命令后,解析数据帧,根据查询命令结果,如:当接收到的是读某一参数命令时,通过映射关系中数据表查找到对应数据,将返回数据命令与参数组成新的数据帧,并将结果发送到监控系统中。
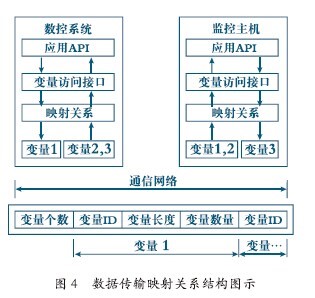
将数控机床及监控系统中内部数据结构与数据命令ID及变量ID建立统一的映射关系,并生成一个映射文件MaP-CFG。在监控系统端,通过生成的MaP-CFG创建一块连续的存储单元存储MAP-CFG中定义的变量,同时建立ID到存储单元地址的映射关系,通过变量ID与映射关系,可以快速地定位须要更新的数据.当应用访问变量时,映射层通过传入的ID号对所需变量在存储中的位置进行定位,并进行读写操作。由于变量的访问都是通过ID号进行的,因此监控系统端应用API和数控机床端应用API是一致的。在初始化时,通过硬编码的方式生成配置文件MAP-CFG,在监控系统中,变量的存储单元由配置文件动态生成,数据传输映射关系如图4所示。
3 监控系统通信验证
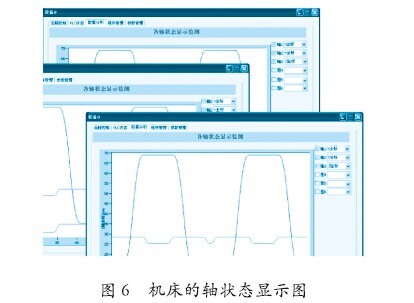
数控机床实时监测功能可以显示机床必要的运行状态信息,包括当前被监控机床的状态,如是否正常运行、急停、或是故障,实时显示当前运动轴执行信息(指令位置、实际位置等)。通过实时监测功能可以动态地以图形模式显示出二维加工轨迹,如图6为被监控机床的轴状态显示图。
监控系统总体结构中包括2部分,即数控机床与监控系统,监控系统的任务也分为2类,即周期任务与非周期任务,周期任务即为在固定的时间内向数控机床发出特定指令,并返回正确结果,如:周期地向数控机床提取各个轴位置指令与反馈、速度、电流等参数,实时地绘制一些二维、三维曲线.非周期任务即不定时地向数控机床发出指令并返回结果,如读取各个机床的参数、数控机床参数等,通过监控系统中寄存器向用户显示,监控系统总体结构如图1所示。
在监控系统中,为了使软件层次分明、结构模块化,监控系统软件由设备层、数据通信服务层、应用功能层、用户访问层所组成.本文主要设计了数据通信服务层,数据通信服务层为上层应用提供多种服务,即提供参数服务、PLC数据服务等,通过这些服务链接了应用功能与物理设备,如图2所示。
监控系统数据通信接口分为数控系统端通信接口和监控系统端通信接口2部分。数控系统与监控系统通过tCP\IP协议连接,监控系统主动发送命令,通过数控系统读取被监控机床的状态参数,数控系统端一般只被动地接收数据命令,解析命令后,发送回反馈结果。
通信接口中,数据传输要经过待机、数据映射、查询命令、封装数据帧、发送数据、接收数据及数据解析等状态,监控系统端数据处理状态如图3所示。
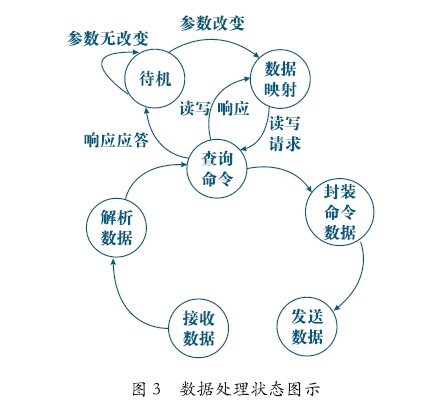
数据的交互是由监控系统端主动发起的,监控系统端通过判断参数是否改变。若改变,则通过参数映射关系与命令查询,开始读、写参数流程,把查询到的具体命令与变量参数组成命令数据帧,发送数据;当接收到数据帧时,自动解析数据帧格式,通过命令查询,判断是读参数、写参数反馈数据帧或是其他响应帧,若是读参数反馈数据帧,则根据解析出的变量参数,通过数据映射更新数据,若未改变,则不执行上述步骤。
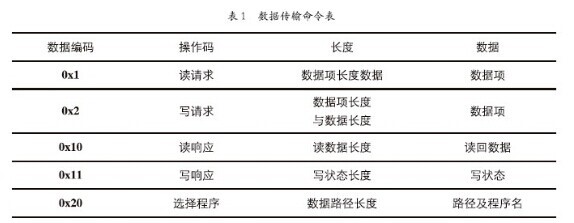
为了方便不同数控机床与不同的监控系统终端间传输数据,设计的数据通信接口采用了数据命令与变量传输的方式,数据命令如表1所示。
监控系统体系结构如图1所示。监控系统PC机带有100MB/S的通用以太网卡;HUB为8口10/100M自适应以太网交换机;华中数控DNC-11数控系统是一种基于ARM平台的嵌入式数控系统,带有10MB/S的通用网络接口;星形拓扑结构中连接的介质为带有RJ45水晶头的普通双绞线。由于在局域网中,接入网络的各台主机的MAC地址不能重合,即使IP配置不同,局域网中的主机也会因为MAC地址重合产生IP地址抢占问题而不能正常连接,因此每个连入局域网中的主机分配的MAC地址必须是唯一的。
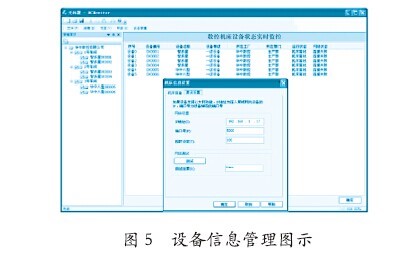
本研究通过运行监控系统的3个功能,验证了设计的通信接口的可行性,其中数控机床的设备信息管理通过以太网将须要进行监控的数控机床连入数控机床监控平台,动态地添加或删除所要测试的数控机床,对数控设备进行在线管理。如图5所示,数控机床信息包括机床的设备编号、设备名称、数控机床型号等。